자율주행차, 어디까지 알고있니? 알면 알수록 미래가 보이는 기술 이야기
등록
2020.07.21
몇 해 전부터 자율주행차는 자동차 시장에서 끊임없이 각광받아 왔습니다. 사실 자율주행에 대한 니즈는 오래 전부터 지속되어왔고, 이미 스마트크루즈컨트롤이나 ADAS와 같이 우리 일상 속에 밀접하게 다가온 기술들도 있습니다. 어느덧 기술의 발전에 따라 레벨0에서 5까지 평가되는 자율주행 단계 중에서 2021년에는 레벨3 양산이 가능하다는 전망도 나오고 있습니다. 오늘은 이렇듯 빠르게 발전하고있는 자율주행차에 들어가는 기술들에 대해 알아보고자 합니다.
자율주행이 가능하기 위해서는 인지 - 판단 - 제어의 과정을 거쳐야하는데, 다양한 기술의 센서를 통해 주변 환경을 정확하고 빠르게 인지하는 것이 첫번째 관문입니다. 오늘은 자율주행차의 눈이 되어주는 센서들에 대하여 알아보겠습니다. 자율주행에 필요한 센서로는 대표적으로 레이더, 라이다, 초음파, 카메라가 있습니다.
자율주행이 가능하기 위해서는 인지 - 판단 - 제어의 과정을 거쳐야하는데, 다양한 기술의 센서를 통해 주변 환경을 정확하고 빠르게 인지하는 것이 첫번째 관문입니다. 오늘은 자율주행차의 눈이 되어주는 센서들에 대하여 알아보겠습니다. 자율주행에 필요한 센서로는 대표적으로 레이더, 라이다, 초음파, 카메라가 있습니다.
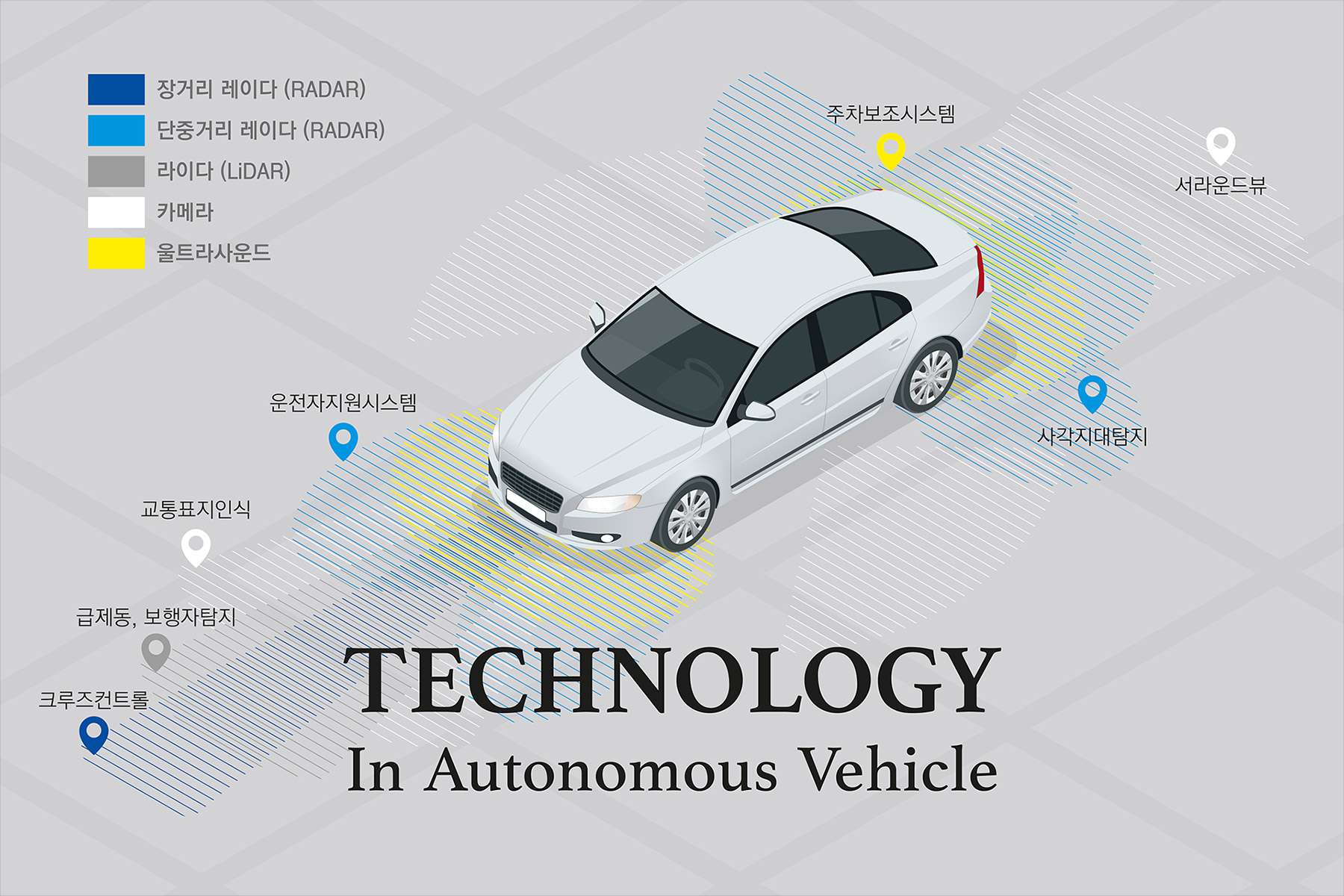
▲ 자율주행차에 필요한 센서 및 기능
레이더(RADAR)
전자파 기반 센서로써 전자파를 발사해 반사돼 돌아오는 신호를 기반으로 주변 사물과의 거리, 속도, 방향 등의 정보를 추출합니다. 가장 보편적인 자율주행 적용 센서이며, 현재 ADAS 기술 (긴급자동제동장치, 스마트크루즈컨트롤 등)에 적용되기도 합니다. 레이더는 100미터 이내의 단거리 뿐만 아니라 200미터 이상의 중·장거리에 있는 사물을 감지하는데 뛰어나며, 날씨나 시간과 같은 외부 영향을 적게 받는 장점이 있습니다. 그러나 사물의 정확한 형체를 인식하는데 어려움이 있으며, 중장거리 인식 시 좁은 화각으로 사각지대가 발생할 수 있다는 해결과제가 있습니다.
라이다(LiDAR)
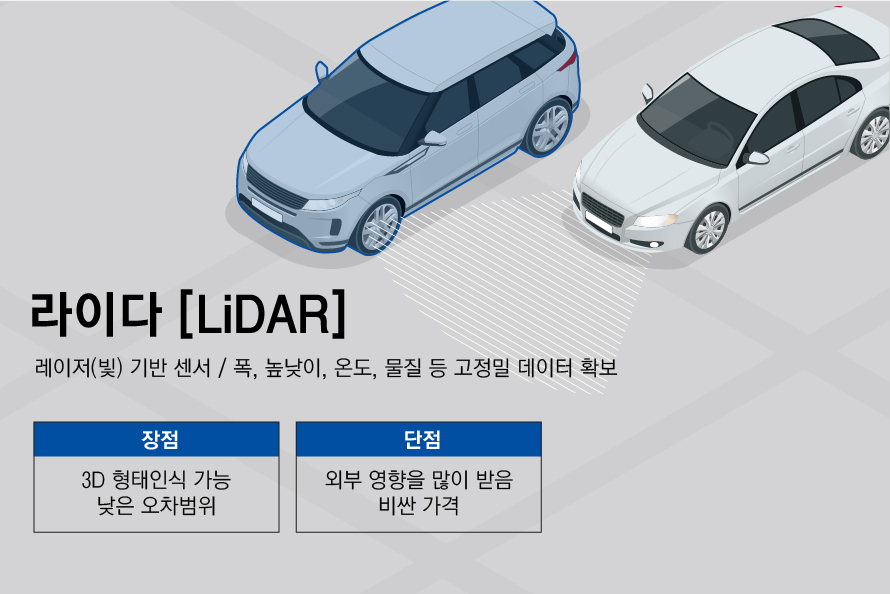
레이저 기반 센서로써 레이더와 유사한 방식으로 특정 신호를 보내고 반사되는 신호를 받아 대상을 추정합니다. 레이더와 달리 직진성이 강한 고출력 펄스 레이저를 통해 보다 정밀한 데이터를 확보할 수 있습니다. 사물의 온도, 높낮이, 폭, 속도, 물질분포 등의 정보를 3D 맵핑하여 영상데이터로 추출합니다. 정확도가 뛰어난 반면, 안개, 눈, 비와 같이 레이저에 굴곡을 발생시키는 외부의 영향을 많이 받고 고가라는 단점이 있어 레이더와 함께 적용하는 방안이 나오고 있습니다.
전자파 기반 센서로써 전자파를 발사해 반사돼 돌아오는 신호를 기반으로 주변 사물과의 거리, 속도, 방향 등의 정보를 추출합니다. 가장 보편적인 자율주행 적용 센서이며, 현재 ADAS 기술 (긴급자동제동장치, 스마트크루즈컨트롤 등)에 적용되기도 합니다. 레이더는 100미터 이내의 단거리 뿐만 아니라 200미터 이상의 중·장거리에 있는 사물을 감지하는데 뛰어나며, 날씨나 시간과 같은 외부 영향을 적게 받는 장점이 있습니다. 그러나 사물의 정확한 형체를 인식하는데 어려움이 있으며, 중장거리 인식 시 좁은 화각으로 사각지대가 발생할 수 있다는 해결과제가 있습니다.
라이다(LiDAR)
레이저 기반 센서로써 레이더와 유사한 방식으로 특정 신호를 보내고 반사되는 신호를 받아 대상을 추정합니다. 레이더와 달리 직진성이 강한 고출력 펄스 레이저를 통해 보다 정밀한 데이터를 확보할 수 있습니다. 사물의 온도, 높낮이, 폭, 속도, 물질분포 등의 정보를 3D 맵핑하여 영상데이터로 추출합니다. 정확도가 뛰어난 반면, 안개, 눈, 비와 같이 레이저에 굴곡을 발생시키는 외부의 영향을 많이 받고 고가라는 단점이 있어 레이더와 함께 적용하는 방안이 나오고 있습니다.

자율주행 센서 1. 레이더
자율주행 센서 2. 라이다
초음파(Ultrasound)
박쥐가 사물을 파악하는 방식을 차용하여, 음파를 내보내 물체에 맞고 반사돼 돌아오는 시간을 측정해 주변 장애물과의 거리를 인식하는 용도로 사용합니다. 빛의 영향을 받지 않아, 야간 환경에서도 뛰어난 사용성을 자랑합니다. 그러나 음파는 거리와 바람에 영향을 받기에 가까운 범위 내에서만 추적할 수 있습니다. 그렇기에 주로 차량 후방 사물인식에 사용되어, 초보운전자들에게 단비와도 같은 후방 주차보조시스템에 활용되고 있습니다.
카메라(Camera)
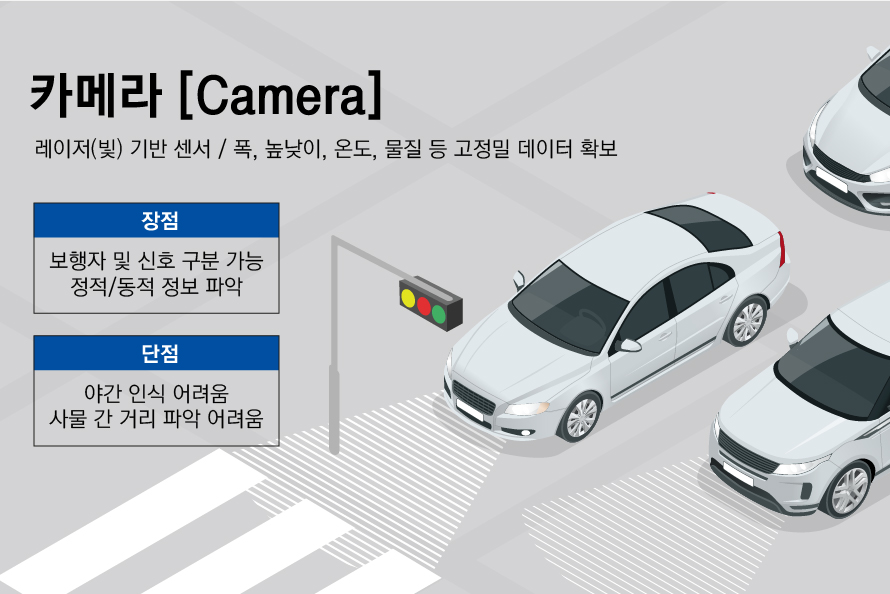
다른 센서와 달리 색감을 인지할 수 있는 카메라는 차로, 신호등, 보행자를 감지 및 식별할 수 있는 기능을 합니다. 사물의 색상과 빛의 영향으로 시인성이 낮은 조건에서는 사용이 어렵우며, 사물간 거리를 파악하는 데이터 수집이 불가하기 때문에 레이더(RADAR)와 병행하여 장단점을 보완할 수 있습니다.
박쥐가 사물을 파악하는 방식을 차용하여, 음파를 내보내 물체에 맞고 반사돼 돌아오는 시간을 측정해 주변 장애물과의 거리를 인식하는 용도로 사용합니다. 빛의 영향을 받지 않아, 야간 환경에서도 뛰어난 사용성을 자랑합니다. 그러나 음파는 거리와 바람에 영향을 받기에 가까운 범위 내에서만 추적할 수 있습니다. 그렇기에 주로 차량 후방 사물인식에 사용되어, 초보운전자들에게 단비와도 같은 후방 주차보조시스템에 활용되고 있습니다.
카메라(Camera)
다른 센서와 달리 색감을 인지할 수 있는 카메라는 차로, 신호등, 보행자를 감지 및 식별할 수 있는 기능을 합니다. 사물의 색상과 빛의 영향으로 시인성이 낮은 조건에서는 사용이 어렵우며, 사물간 거리를 파악하는 데이터 수집이 불가하기 때문에 레이더(RADAR)와 병행하여 장단점을 보완할 수 있습니다.

자율주행 센서 3. 초음파
자율주행 센서 4. 카메라
V2X(Vehicle to Everything)으로 발전하기 위해, 주위 차량, 사물, 보행자 및 신호에 대한 정보를 실시간으로 연결해야하기에 앞으로 이러한 센서들이 어떻게 발전되고 융합될지 기대해봅니다. 이러한 인지 센서를 통해 수집한 데이터로 수 많은 주행연습을 통해 딥러닝 기반 인공지능이 탑재된 자율주행 자동차로 발전하는 모습을 볼 수 있을 것입니다.